Output history to CSV
When output history to CSV is enabled a file called GuidingHistory.csv is created in the working folder.
Each iteration of the guiding loop correspond to a row in the file
 The file name i.e. GuidingHistory_v3_3_7067_38828.csv also contain the full version number to make a different file per version. This allows changing the structure of the file in a new version without any format conflict with the files already captured from older versions.
The file name i.e. GuidingHistory_v3_3_7067_38828.csv also contain the full version number to make a different file per version. This allows changing the structure of the file in a new version without any format conflict with the files already captured from older versions.
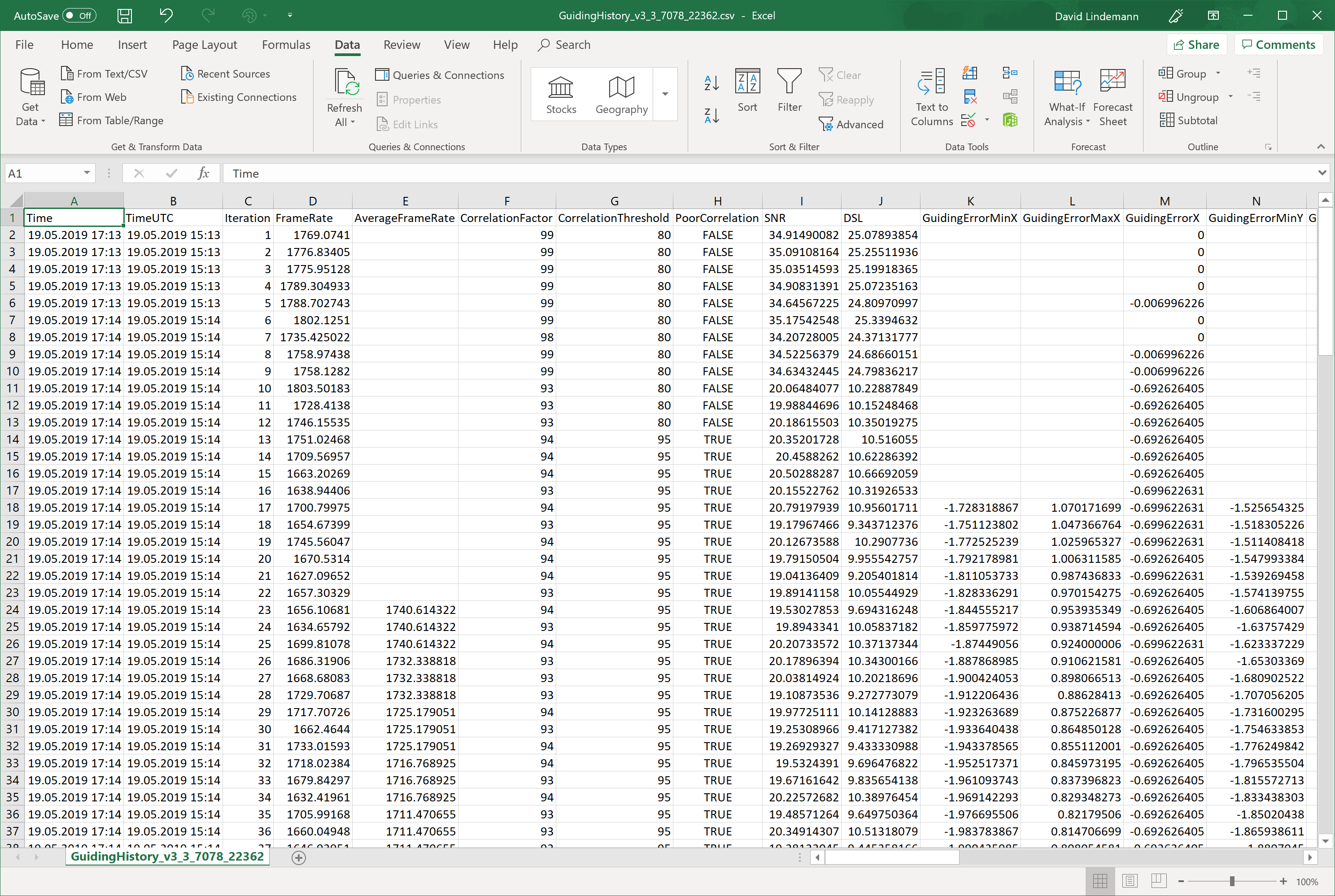
 This file is very useful to analyze what happened during the full capture session, helping for support or to review your auto-guiding performances.
This file is very useful to analyze what happened during the full capture session, helping for support or to review your auto-guiding performances.
Using Excel is it easy from the data any relevant plots.
Column name |
Meaning |
Time |
Local timestamp. |
TimeUTC |
UTC timestamp. |
Iteration |
Corresponding guiding loop iteration number. |
FrameRate |
Time in milliseconds of one guiding loop iteration. |
AverageFrameRate |
Average time in milliseconds of all guiding loop iterations. |
CorrelationFactor |
Percentage of correlation (0% to 100%) between the current guider camera output frame and the guider reference frame. |
CorrelationThreshold |
Defines the minimum value before suspending guiding |
PoorCorrelation |
True if the correlation factor is below the correlation threshold. Otherwise False. |
SNR |
Signal-to-Noise ratio of the stacked frame in dB |
DSL |
Dynamic range ratio of the stacked frame in dB |
GuidingErrorMinX |
Minimum value on X axis in the specified units for the error protection envelope. If the guiding error is below the minimum and if the error protection is enabled the guiding is suspended for the specified number of iterations. |
GuidingErrorMaxX |
Maximum value on X axis in the specified units for the error protection envelope. If the guiding error is above the maximum and if the error protection is enabled the guiding is suspended for the specified number of iterations. |
GuidingErrorX |
Closed loop error on X axis in the specified units.
|
GuidingErrorMinY |
Minimum value on Y axis in the specified units for the error protection envelope. If the guiding error is below the minimum and if the error protection is enabled the guiding is suspended for the specified number of iterations. |
GuidingErrorMaxY |
Maximum value on Y axis in the specified units for the error protection envelope. If the guiding error is above the maximum and if the error protection is enabled the guiding is suspended for the specified number of iterations. |
GuidingErrorY |
Closed loop error on Y axis in the specified units.
|
AggressivenessX |
Aggressiveness for X axis (0% to 100%). |
AggressivenessY |
Aggressiveness for Y axis (0% to 100%). |
CorrectionX |
Correction on X axis (pulse guide duration in seconds). |
CorrectionY |
Correction on Y axis (pulse guide duration in seconds). |
NoCorrectionX |
True if no correction has been sent to the X axis of the guider relay. Otherwise False.
|
NoCorrectionY |
True if no correction has been sent to the X axis of the guider relay. Otherwise False.
|
GuidingErrorMeanX |
Average closed loop error on X axis for closed loop in the specified units. |
GuidingErrorStDevX |
Root mean square error on X axis for closed loop in the specified units (used in the error reduction calculation). |
GuidingErrorMeanY |
Average closed loop error on Y axis for closed loop in the specified units. |
GuidingErrorStDevY |
Root mean square error on Y axis for closed loop in the specified units (used in the error reduction calculation). |
MountTrackingErrorX |
Open loop error on X axis in the specified units.
|
MountTrackingErrorY |
Open loop error on Y axis in the specified units.
|
MountTrackingErrorMeanX |
Average open loop error on X axis for open loop in the specified units. |
MountTrackingErrorStDevX |
Root mean square error on X axis for open loop in the specified units (used in the error reduction calculation). |
MountTrackingErrorMeanY |
Average open loop error on Y axis for open loop in the specified units. |
MountTrackingErrorStDevY |
Root mean square error on Y axis for open loop in the specified units (used in the error reduction calculation). |
TrackingErrorReductionX |
Percentage of tracking error on X axis (open loop) that is reduced by the guiding algorithm. |
TrackingErrorReductionY |
Percentage of tracking error on Y axis (open loop) that is reduced by the guiding algorithm. |
DriftX |
Drift on X axis in the specified units per minute.
|
DriftY |
Drift on Y axis in the specified units per minute.
|
DitheringOffsetX |
Offset on X axis currently used by the dithering process in pixel image |
DitheringOffsetY |
Offset on Y axis currently used by the dithering process in pixel image |
Units |
Unit for the errors. There is two choice : pixel image and arc-second. |